Note
Go to the end to download the full example code.
3.4.4 Integral operator - inverse gradient operator
Given a kernel gradient operator ∇ₖ, CodPy defines an integral-type inverse operator denoted by:
Matrix Interpretation
To compute this operator, the gradient tensor
Then, its transpose is multiplied by the inverse Laplacian \(\Delta_k^{-1}\) to obtain \(\nabla_k^{-1}\).
This operator acts on a vector field \(v_z \in \mathbb{R}^{D \times N_z \times D_{v_z}}\) and returns:
** Least-Squares Formulation **
Conceptually, this operation solves the following minimization problem:
That is, it finds the best function \(h\) whose kernel gradient approximates a given vector field \(v_z\).
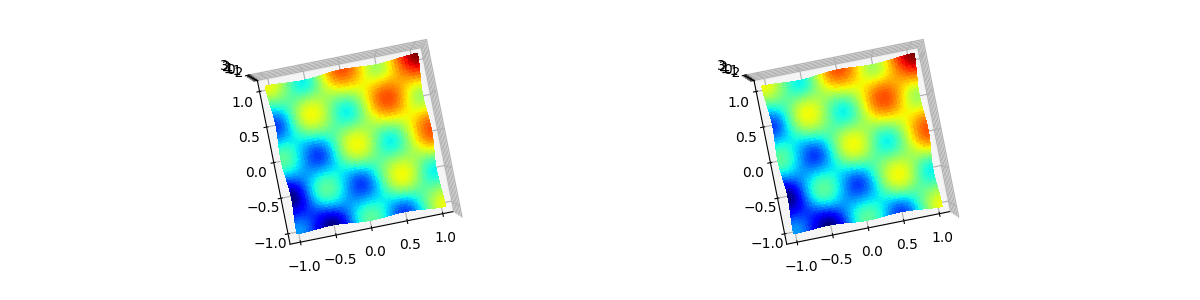
Example: 2D Case
In 2D, we can verify the behavior of the inverse by checking whether the composition:
recovers the original function \(f(X)\).
This test confirms whether \(\nabla_k^{-1} \nabla_k\) approximates the identity.
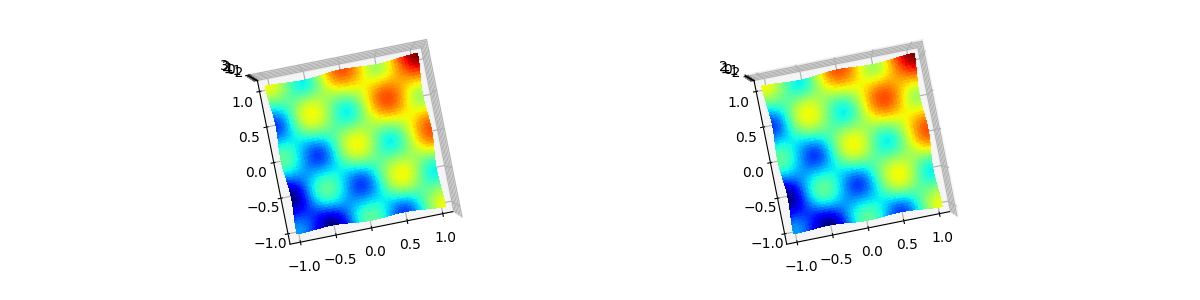
Extrapolation
We can also evaluate generalization by applying:
This measures how well the inverse-gradient operator extrapolates from \(X\) to unseen points \(Z\).
# Importing necessary modules
import os
import sys
from matplotlib import pyplot as plt
curr_f = os.path.join(os.getcwd(), "codpy-book", "utils")
sys.path.insert(0, curr_f)
import numpy as np
# from codpy.plotting import plot1D
# Lets import multi_plot function from codpy utils
from codpy.plot_utils import multi_plot
# Define the sinusoidal function
def periodic_fun(x):
"""
A sinusoidal function that generates a sum of sines based on the input ``x``.
"""
from math import pi
sinss = np.cos(2 * x * pi)
if x.ndim == 1:
sinss = np.prod(sinss, axis=0)
ress = np.sum(x, axis=0)
else:
sinss = np.prod(sinss, axis=1)
ress = np.sum(x, axis=1)
return ress + sinss
def nabla_my_fun(x):
from math import pi
import numpy as np
sinss = np.cos(2 * x * pi)
if x.ndim == 1:
sinss = np.prod(sinss, axis=0)
D = len(x)
out = np.ones((D))
def helper(d):
out[d] += 2.0 * sinss * pi * np.sin(2 * x[d] * pi) / np.cos(2 * x[d] * pi)
[helper(d) for d in range(0, D)]
else:
sinss = np.prod(sinss, axis=1)
N = x.shape[0]
D = x.shape[1]
out = np.ones((N, D))
def helper(d):
out[:, d] += (
2.0 * sinss * pi * np.sin(2 * x[:, d] * pi) / np.cos(2 * x[:, d] * pi)
)
[helper(d) for d in range(0, D)]
return out
# Function to generate periodic data
def generate_periodic_data_cartesian(size_x, size_z, fun=None, nabla_fun=None):
"""
Generates 2D structured Cartesian grid data for x and z domains,
and evaluates a given function and optionally its gradient.
Parameters:
- size_x: number of points per axis for x (grid will be size_x^2)
- size_z: number of points per axis for z (grid will be size_z^2)
- fun: function to evaluate at each point
- nabla_fun: optional gradient function to evaluate
Returns:
- x, z: 2D Cartesian grids of shape (N, 2)
- fx, fz: function values at x and z
- nabla_fx, nabla_fz (if nabla_fun is provided)
"""
def cartesian_grid(size, box):
lin = [np.linspace(box[0, d], box[1, d], size) for d in range(2)]
X, Y = np.meshgrid(*lin)
return np.stack([X.ravel(), Y.ravel()], axis=1)
# Define domain boxes
X_box = np.array([[-1, -1], [1, 1]])
Z_box = np.array([[-1.5, -1.5], [1.5, 1.5]])
# Generate Cartesian grids
x = cartesian_grid(size_x, X_box)
z = cartesian_grid(size_z, Z_box)
# Function evaluations
fx = fun(x).reshape(-1, 1) if fun else None
fz = fun(z).reshape(-1, 1) if fun else None
if nabla_fun:
nabla_fx = nabla_fun(x)
nabla_fz = nabla_fun(z)
return x, fx, z, fz, nabla_fx, nabla_fz
return x, fx, z, fz
# Lets define helper function to plot 3D projection of the function
def plot_trisurf(xfx, ax, legend="", elev=90, azim=-100, **kwargs):
from matplotlib import cm
"""
Helper function to plot a 3D surface using a trisurf plot.
Parameters:
- xfx: A tuple containing the x-coordinates (2D points) and their
corresponding function values.
- ax: The matplotlib axis object for plotting.
- legend: The legend/title for the plot.
- elev, azim: Elevation and azimuth angles for the 3D view.
- kwargs: Additional keyword arguments for further customization.
"""
xp, fxp = xfx[0], xfx[1]
x, fx = xp, fxp
X, Y = x[:, 0], x[:, 1]
Z = fx.flatten()
ax.plot_trisurf(X, Y, Z, antialiased=False, cmap=cm.jet)
ax.view_init(azim=azim, elev=elev)
ax.title.set_text(legend)
# import CodPy's core module and Kernel class
from codpy import core
from codpy.kernel import Kernel
Integral operator - inverse gradient operator
def fun_NablainvNabla1(size_x=50, size_y=50):
x, fx, z, fz, _, nabla_fz = generate_periodic_data_cartesian(
size_x, size_y, periodic_fun, nabla_fun=nabla_my_fun
)
nabla_fz = nabla_fz.reshape(-1, 2, 1)
kernel_ptr = Kernel(
x=x, fx=fx, set_kernel=core.kernel_setter("tensornorm", "scale_to_unitcube")
).get_kernel()
fz_inv = core.DiffOps.nabla_inv(
x=x,
y=x,
z=x,
kernel_ptr=kernel_ptr,
fz=core.DiffOps.nabla(x=x, y=x, z=x, fx=fx, kernel_ptr=kernel_ptr),
)
multi_plot(
[(x, fx), (x, fz_inv)],
plot_trisurf,
projection="3d",
mp_nrows=1,
mp_figsize=(12, 3),
mp_titles=[
"Comparison between original function to the product of the gradient operator and its inverse"
],
)
plt.show()
fun_NablainvNabla1()
def fun_NablainvNabla2(size_x=50, size_y=50):
x, fx, z, fz, _, nabla_fz = generate_periodic_data_cartesian(
size_x, size_y, periodic_fun, nabla_fun=nabla_my_fun
)
nabla_fz = nabla_fz.reshape(-1, 2, 1)
kernel_ptr = Kernel(
x=x, fx=fx, set_kernel=core.kernel_setter("tensornorm", "scale_to_unitcube")
).get_kernel()
fz_inv = core.DiffOps.nabla_inv(
x=x,
y=x,
z=z,
kernel_ptr=kernel_ptr,
fz=core.DiffOps.nabla(x=x, y=x, z=z, fx=fx, kernel_ptr=kernel_ptr),
)
multi_plot(
[(x, fx), (x, fz_inv)],
plot_trisurf,
projection="3d",
mp_nrows=1,
mp_figsize=(12, 3),
mp_titles=[
"Comparison between original function to the product of the inverse of the gradient operator and the gradient operator"
],
)
plt.show()
fun_NablainvNabla2()
Total running time of the script: (0 minutes 2.915 seconds)