Note
Go to the end to download the full example code.
9.06 Additive noise map
We reproduce here the figure 9.6 of the book. Utilitary functions can be found next to this file. Here, we only define codpy-related functions.
Necessary Imports
import os
import sys
import matplotlib.pyplot as plt
import numpy as np
from codpy.kernel import Sampler
try:
CURRENT_DIR = os.path.dirname(os.path.abspath(__file__))
except NameError:
CURRENT_DIR = os.getcwd()
data_path = os.path.join(CURRENT_DIR, "data")
PARENT_DIR = os.path.abspath(os.path.join(CURRENT_DIR, ".."))
sys.path.insert(0, PARENT_DIR)
import utils.ch9.mapping as maps
from utils.ch9.data_utils import stats_df
from utils.ch9.market_data import retrieve_market_data
from utils.ch9.path_generation import generate_paths
from utils.ch9.plot_utils import display_historical_vs_generated_distribution
Parameter definition
def get_cdpres_param():
return {
"rescale_kernel": {"max": 2000, "seed": None},
"rescale": True,
"grid_projection": True,
"reproductibility": False,
"date_format": "%d/%m/%Y",
"begin_date": "01/06/2020",
"end_date": "01/06/2022",
"today_date": "01/06/2022",
"symbols": ["AAPL", "GOOGL", "AMZN"],
}
Get the market data
params = retrieve_market_data()
Defining the map
The additive noise map is defined as:
\[\eta_Y(\varepsilon) = \varepsilon - f(Y), \qquad \varepsilon = \eta_Y^{-1}(\eta) = \eta + f(Y),\]
Where, \(\eta_Y\) is a white noise, that is an independent random variable, and
\(f : \mathbb{R}^{D_Y} \to \mathbb{R}^{D_{\varepsilon}}\) is a smooth function modeling the dependence of \(\varepsilon\) on \(Y\). If unknown, \(f\) can be estimated from historical data using the denoising algorithm
params["map"] = maps.composition_map(
[maps.additive_noise_map(), maps.log_map, maps.remove_time()]
)
params = maps.apply_map(params)
We define our sampler on the mapped data using codpy’s Sampler
You can define your own latent generator function, here we use a simple uniform distribution. But if not provided, a default one will be used by the Sampler class.
mapped_data = params["transform_h"].values
generator = lambda n: np.random.uniform(size=(n, mapped_data.shape[1]))
sampler = Sampler(mapped_data, latent_generator=generator)
params["sampler"] = sampler
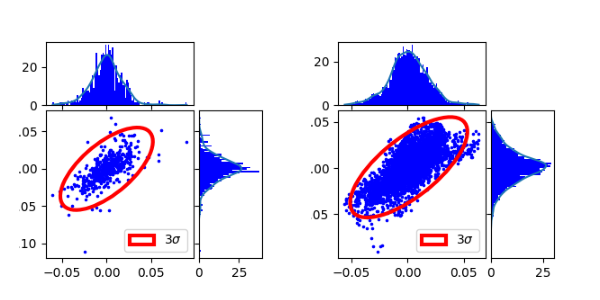
We plot the original distribution vs the generated one
params = display_historical_vs_generated_distribution(params)
params["graphic"](params)
plt.show()
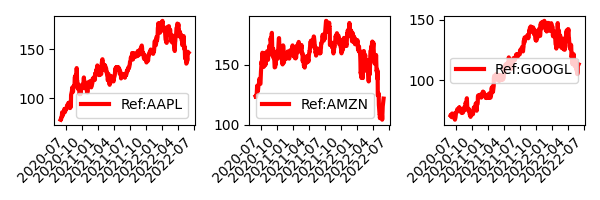
Reproductibility test
We regenerate the same path by generating from the latent representation We make sure we get the original data back.
params["reproductibility"] = True
params = generate_paths(params)
params["graphic"](params)
plt.show()
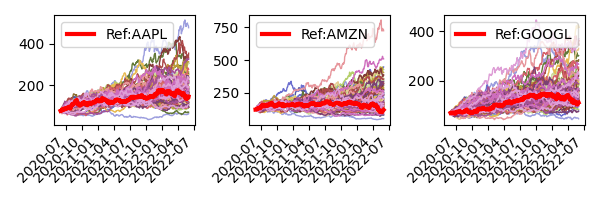
We now generate a new set of 10 paths
params["reproductibility"] = False
params["Nz"] = 100
params = generate_paths(params)
params["graphic"](params)
plt.show()
stats = stats_df(params["transform_h"], params["transform_g"]).T
print(stats)
0 1 2
Mean -2.4e-06(0.0011) -4.8e-06(0.0009) 1.3e-06(0.00052)
Variance 0.19(0.039) -0.36(-0.19) -0.1(-0.16)
Skewness 0.0003(0.0003) 0.00034(0.00033) 0.00025(0.00023)
Kurtosis 2.1(0.62) 3.4(0.72) 1.3(0.058)
KS test 0.11(0.05) 0.36(0.05) 0.58(0.05)
Total running time of the script: (0 minutes 4.208 seconds)