Note
Go to the end to download the full example code.
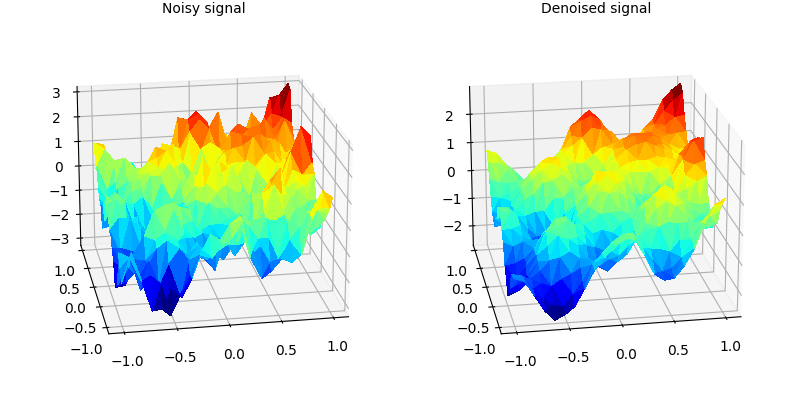
7.02 Denoising
We reproduce here the figure 7.3 of the book. Utilitary functions can be found next to this file. Here, we only define codpy-related functions.
Necessary Imports
import os
import sys
import matplotlib.pyplot as plt
try:
CURRENT_DIR = os.path.dirname(os.path.abspath(__file__))
except NameError:
CURRENT_DIR = os.getcwd()
data_path = os.path.join(CURRENT_DIR, "data")
PARENT_DIR = os.path.abspath(os.path.join(CURRENT_DIR, ".."))
sys.path.insert(0, PARENT_DIR)
from utils.ch7.ch7_utils import Denoising
Problem statement
We consider the denoiser procedure introduced in the book, which aims to solve:
\[\inf_{G \in \mathcal{H}_k} \|G-F\|_{L^2}^2 + \epsilon \|\nabla G\|_{L^2}^2.\]
The noisy signal (left image) is given by \(F_\eta(x) = F(x) + \eta\), where \(\eta\) is a white noise, and \(f\) is a cosine function. The regularized solution is plotted on the right.
Denoising()
plt.show()
Total running time of the script: (0 minutes 0.185 seconds)